
Guangdong Hinson Technology Co., Ltd.



Manual del usuario FE35FB-01000
Este manual es adecuado para el sensor de escaneo láser FE35FB-01000.
Autor: Hinson Versión de lanzamiento: V1.00 Hora de actualización: 2024.10.16
1.1 Notas sobre el entorno aplicable
 El vapor, el humo, el polvo y las partículas visibles en el aire pueden hacer que el sensor se equivoque o incluso que deje de funcionar.
El vapor, el humo, el polvo y las partículas visibles en el aire pueden hacer que el sensor se equivoque o incluso que deje de funcionar.
Los técnicos cualificados deben comprobar periódicamente si las conexiones e instalaciones del sensor son correctas.
La vida útil máxima del sensor es de 10 años; después de eso, debe reemplazarse, de lo contrario, es posible que no cumpla con los estándares de rendimiento requeridos.
El sensor debe revisarse y limpiarse periódicamente.
Este producto solo puede utilizarse dentro de los límites especificados y bajo los parámetros técnicos y las condiciones de funcionamiento designados en todo momento.
1.2 Notas sobre el entorno de cableado
 No invierta la fuente de alimentación ni la conecte a un voltaje superior al voltaje máximo de funcionamiento especificado, ya que esto podría dañar el sensor.
No invierta la fuente de alimentación ni la conecte a un voltaje superior al voltaje máximo de funcionamiento especificado, ya que esto podría dañar el sensor.
Conectar la fuente de alimentación por debajo del voltaje mínimo de funcionamiento especificado hará que el sensor funcione mal o de forma anormal.
Siga las instrucciones del manual para el cableado; de lo contrario, el sensor puede no detectar correctamente la señal de entrada.
No exceda la capacidad de carga del sensor al conectar dispositivos al terminal de señal de salida, ya que esto puede provocar un fallo del sensor.
1.3 Notas sobre el entorno de depuración
Solo el personal autorizado cualificado puede conectar, instalar, depurar y configurar el sensor láser.
Asegúrese de que los dispositivos periféricos asociados al sensor estén en un estado de parada fiable.
Asegúrese de que el personal de depuración esté en una posición segura.
Asegúrese de que otro personal u objetos estén fuera del rango activo del equipo.
2.1 Características principales
| Rendimiento | |
Distancia de detección |
0.05 m-8 m (@ reflectividad 2 %) 0.05 m-35 m (@ reflectividad 90 %) |
Ángulo de detección |
312° |
Frecuencia de medición |
540Khz |
Método de medición |
Tecnología de medición de pulsos (PRT) |
Frecuencia de escaneo |
12.5 Hz: 750 r/min (0.025°, 0.05°, 0.1°, 0.25°, 0.5° resolución angular) 25.0 Hz: 1500 r/min (0.05°, 0.1°, 0.25°, 0.5° resolución angular) |
Reconocimiento de la forma del objeto |
Cualquier forma, resolución calculada en función de la distancia de detección |
Resolución de medición |
1mm |
Precisión absoluta |
±10 mm |
Ruido de medición |
±20 mm |
| Interfaz | |
Entrada de conmutación |
4*NPN |
Salida de conmutación |
4*NPN |
CAN |
Bus CAN CAN OPEN *1 |
Ethernet |
TCP/IP (servidor TCP, UDP) 100 M |
Número de ecos |
3 |
Salida de datos de medición sin procesar |
Admitido |
Número de protección de área |
3 |
Número de canales de evitación de obstáculos |
64 |
| Mechanical/Electrical | |
Voltaje de funcionamiento |
DC 10-30 V |
Corriente de funcionamiento |
125-150mA |
Consumo de energía |
< 3,4 W |
Longitud de onda de la fuente de luz |
905nm |
Clase láser |
Clase 1 (IEC 60825-1:2014) |
Luz indicadora |
4*LED (luz indicadora de estado de funcionamiento verde, luz indicadora de estado de salida amarilla, naranja, roja) |
Material |
Aleación de aluminio, PMMA |
Nivel de protección |
IP65 |
1 |
Sensor láser FE |
1 unit |
2 |
Software de configuración Hinson |
1 set |
3 |
Certificado de cualificación del sensor |
1 piece |
Herramientas de software |
Versión del software Hinson 1.5.2 o superior |
1 set |
Fuente de alimentación |
Fuente de alimentación de 24 V CC |
1 piece |
Herramientas |
La configuración del ordenador tiene un puerto RJ45 (u obtenido mediante conversión) |
1 piece |
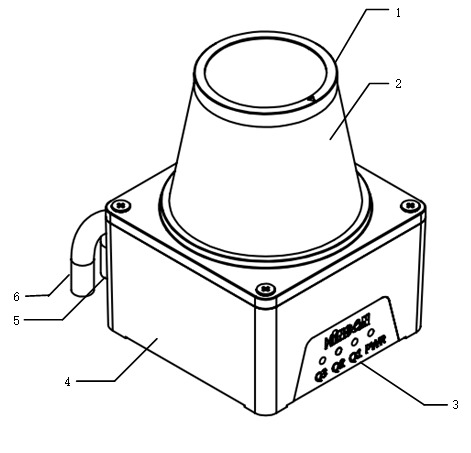
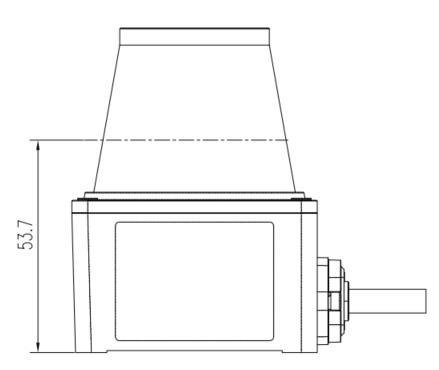
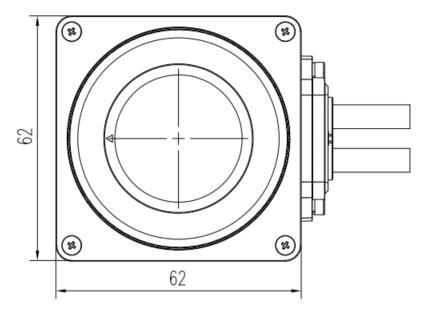
4.2 Descripción de los componentes
Número de serie |
Descripción de la función | Observaciones |
1 |
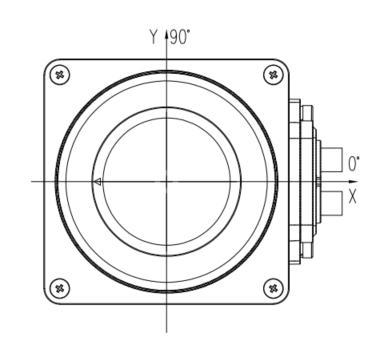
Tapa superior | Indica el rango de escaneo y la posición del ángulo |
2 |
Ventana de detección del sensor | Ventana de detección del sensor |
3 |
Luz indicadora | Muestra el estado de funcionamiento |
4 |
Base | Posición del orificio de instalación |
5 |
Línea de salida 1 | Conexión de cable Ethernet |
6 |
Línea de salida 2 | Conexión de línea de señal de alimentación y E/S |
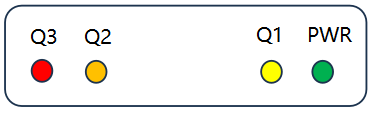
4.3 Descripción de la luz indicadora
Identificación |
Pantalla |
Descripción de la función | Instrucciones de funcionamiento |
PWR |
Verde |
Luz indicadora de estado de funcionamiento | Luz indicadora verde Apagado: El sensor no está alimentado o no funciona correctamente; Encendido: El sensor funciona normalmente; Parpadeando: El sensor detecta un fallo interno, deja de funcionar; |
Q1 |
Amarillo |
Luz indicadora de salida OUT1 | Luz indicadora amarilla Apagado: El sensor no está alimentado, no se detecta ningún objeto; Encendido: Objeto intruso detectado; Parpadeando: El sensor detecta el borde de activación; |
Q2 |
Naranja |
Luz indicadora de salida OUT2 | Luz indicadora naranja Apagado: El sensor no está alimentado, no se detecta ningún objeto; Encendido: Objeto intruso detectado; Parpadeando: El sensor detecta el borde de activación; |
Q3 |
Rojo |
Luz indicadora de salida OUT3 | Luz indicadora roja Apagado: El sensor no está alimentado, no se detecta ningún objeto; Encendido: Objeto intruso detectado; Parpadeando: El sensor detecta el borde de activación; |
|
|
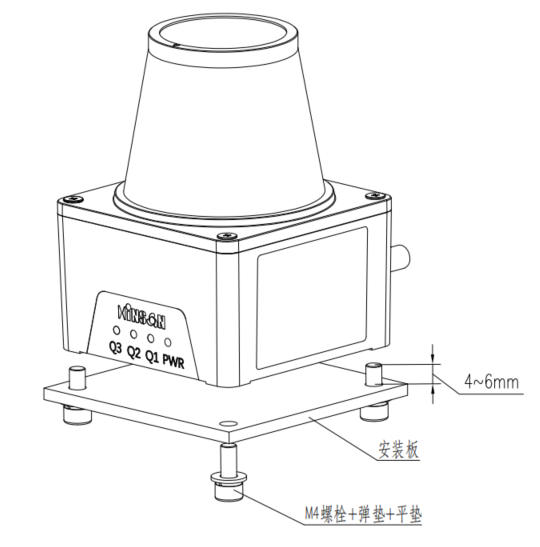
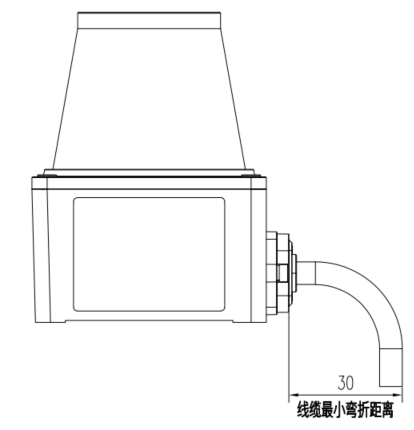
Los tornillos fijos deben tener arandelas de muelle para evitar que se aflojen |
Reservar 30 mm de espacio en la parte trasera para los cables |
5.1 Puertos de cantidad de alimentación y conmutador
| Función | E/S, Fuente de alimentación, Comunicación Ethernet |
| Tipo | Alambres |
| Especificaciones del terminal | RJ45, FT10001-F2H |
| Número de pines | 14 pins |
| Método de salida | Salida directa |
Terminal |
Número de serie |
Símbolo |
Color |
Función |
CN3 |
Pin1 |
+VIN |
Marrón |
Entrada de alimentación positiva |
Pin2 |
-VIN |
Azul |
Entrada de alimentación negativa | |
Pin3 |
XCOM |
Brown-white |
Terminal común de entrada | |
Pin4 |
IN1 |
Negro |
Entrada E/S 1 | |
Pin5 |
IN2 |
Naranja |
Entrada E/S 2 | |
Pin6 |
IN3 |
Amarillo |
Entrada E/S 3 | |
Pin7 |
CAN_L |
Verde |
CAN_L | |
Pin8 |
CAN_H |
Morado |
CAN_H | |
Pin9 |
IN4 |
Gris |
Entrada E/S 4 | |
Pin10 |
YCOM |
Blanco |
Terminal común de salida | |
Pin11 |
OUT1 |
White-green |
Salida E/S 1 | |
Pin12 |
OUT2 |
White-blue |
Salida E/S 2 | |
Pin 13 |
OUT 3 |
Rojo |
Salida E/S 3 | |
Pin 14 |
OUT 4 |
Blanco y rojo |
Salida E/S 4 |
Terminal |
Número de serie |
Símbolo |
Color |
Función |
CN2 |
Pin1 |
ETH TX+ |
Rojo y blanco |
Salida Ethernet + |
Pin2 |
ETH TX- |
Rojo |
Salida Ethernet - | |
Pin3 |
ETH RX+ |
Verde y blanco |
Entrada Ethernet + | |
Pin4 |
ETH RX- |
Verde |
Entrada Ethernet - |
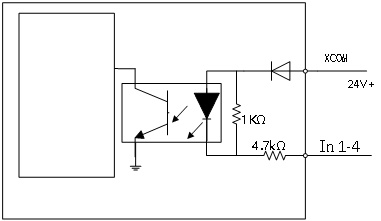
5.2.1 Conexión de señal de entrada
La entrada es una señal NPN, que utiliza una entrada con aislamiento óptico.
Utilizar fuente de alimentación externa: Entrada XC0M DC24V±20%, superior a 100 mA;
El sensor tiene 16 canales, cuyas señales de entrada se combinan a través de 4 puertos de E/S para conmutar al número de canal especificado. El rango de detección del canal debe configurarse previamente mediante el software de configuración. Los dispositivos externos seleccionan y conmutan las regiones mediante señales de entrada.
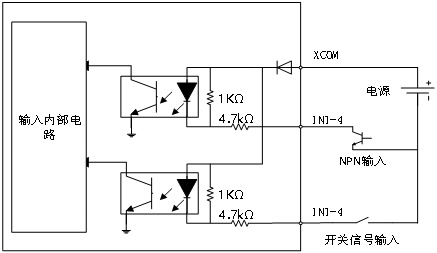
El sensor FE proporciona 4 puertos de entrada para combinar señales.
ENCENDIDO: Hay señal;
APAGADO: Sin señal o circuito abierto;
| Número de canal | IN4 | IN3 | IN2 | IN1 |
| 63 | APAGADO | APAGADO | APAGADO | APAGADO |
| 62 | APAGADO | APAGADO | APAGADO | ENCENDIDO |
| 61 | APAGADO | APAGADO | ENCENDIDO | APAGADO |
| 60 | APAGADO | APAGADO | ENCENDIDO | ENCENDIDO |
| 59 | APAGADO | ENCENDIDO | APAGADO | APAGADO |
| 58 | APAGADO | ENCENDIDO | APAGADO | ENCENDIDO |
| 57 | APAGADO | ENCENDIDO | ENCENDIDO | APAGADO |
| 56 | APAGADO | ENCENDIDO | ENCENDIDO | ENCENDIDO |
| 55 | ENCENDIDO | APAGADO | APAGADO | APAGADO |
| 54 | ENCENDIDO | APAGADO | APAGADO | ENCENDIDO |
| 53 | ENCENDIDO | APAGADO | ENCENDIDO | APAGADO |
| 52 | ENCENDIDO | APAGADO | ENCENDIDO | ENCENDIDO |
| 51 | ENCENDIDO | ENCENDIDO | APAGADO | APAGADO |
| 50 | ENCENDIDO | ENCENDIDO | APAGADO | ENCENDIDO |
| 49 | ENCENDIDO | ENCENDIDO | ENCENDIDO | APAGADO |
| 48 | ENCENDIDO | ENCENDIDO | ENCENDIDO | ENCENDIDO |
Recordatorio : Si no se necesitan los 16 canales, las señales de entrada se pueden determinar en función del número de canales necesarios.
Tiempo de conmutación
Después de que el sensor recibe la señal de conmutación de canal, hay un retardo de conmutación debido al ciclo de exploración. El retardo de conmutación se muestra en la figura siguiente.
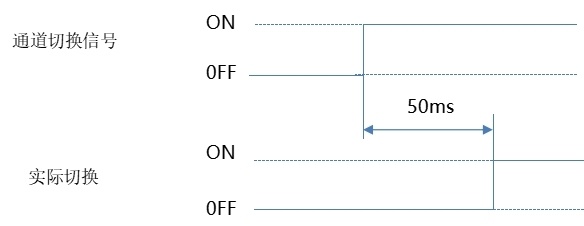
Nota Al cambiar a un canal sin gráfico, el sensor continuará monitorizando el estado del canal gráfico anterior;
5.2.3 Cableado de la señal de salida
La señal de salida utiliza la función
| Puerto | Función | Lógica de salida |
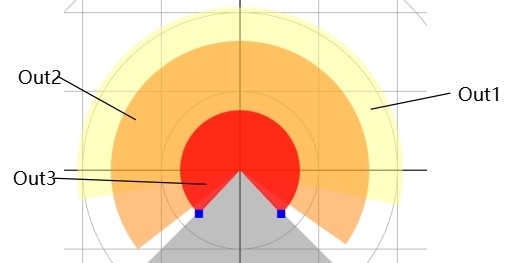
| OUT1 | Utilizado para la advertencia y desaceleración de obstáculos remotos; | Predeterminado: Normalmente cerrado, se puede cambiar a normalmente abierto a través del software de configuración; |
| OUT2 | Utilizado para la detección y parada de obstáculos normales; | Predeterminado: Normalmente cerrado, se puede cambiar a normalmente abierto a través del software de configuración; |
| OUT 3 | Utilizado para parada de emergencia de extremo cercano; | Predeterminado: Normalmente cerrado, se puede cambiar a normalmente abierto a través del software de configuración; |
| ERR | Utilizado para la salida del estado de falla del sensor; | Predeterminado: Normalmente abierto, no se puede cambiar; |
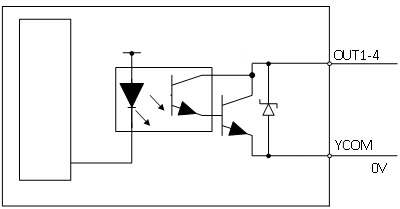
La salida es una señal abierta de colector (NPN), utilizando una salida optoaislada, el voltaje de salida es 0V- cuando hay una señal.
Todos los puertos de salida son salidas NPN. Consulte el diagrama esquemático a continuación:
|
||
Los puertos de salida del sensor corresponden a los gráficos dibujados en el software de configuración.
|
||
| Nota: La salida de detección solo ocurrirá cuando la salida correspondiente tenga un gráfico dibujado; | ||
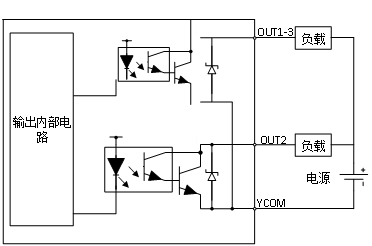
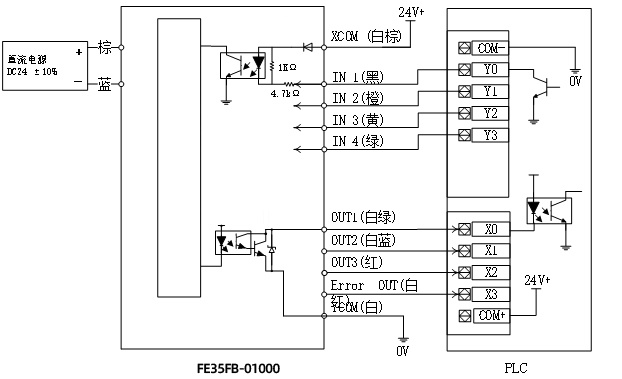
5.2.4 Diagrama de conexión
Cableado cuando los 16 canales y todas las salidas están completamente utilizados.
|
|
| PLC FE35FB--01000 | |
| La figura muestra la computadora superior emitiendo señales a través de tubos NPN y recibiendo señales. | |
X0-X3 son los puertos de entrada de señal del PLC; |
|
| Nota: Los puertos de entrada y salida no deben cortocircuitarse ni conectarse a cargas que superen la corriente especificada, de lo contrario, puede causar daños al sensor. |
6. Configuración de la función
6.1 Preparación del dispositivo
| Fuente de alimentación de CC | Voltaje | DC10V-DC30V |
| Corriente | Superior a 1A | |
| Computadora | Sistema | Windows 7 y superior |
| Puerto | Equipado con interfaz RJ45 o equipado con interfaz de cable de red USB a RJ45 | |
| Resolución | Superior a 1280*720 |
6.2 Conexión entre el sensor y el software de configuración
6.2.1 Abrir el software de configuración
Descomprima el software de configuración y haga doble clic  Después de ingresar a la interfaz 'Lista de dispositivos', haga clic
Después de ingresar a la interfaz 'Lista de dispositivos', haga clic  Ingrese a la siguiente interfaz:
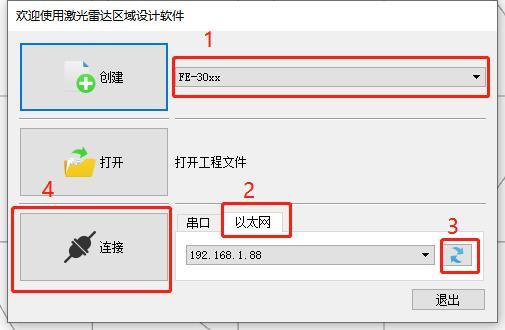
Ingrese a la siguiente interfaz:
Conecte el sensor y el software de configuración de acuerdo con los pasos 1, 2, 3, 4.
Después de que el sensor esté conectado al software de configuración, se muestra la siguiente interfaz:
Menú principal |
Menú secundario |
Menú terciario |
Icono correspondiente | Observaciones |
|---|---|---|---|---|
Archivo |
Nuevo archivo |
- |

|
Nuevo archivo |
Abrir archivo |
- |

|
Abrir un archivo existente | |
Guardar archivo |
- |

|
Guardar el archivo editado | |
Guardar como |
- |

|
Guardar el archivo editado como | |
Salir |
- |

|
Salir de la interfaz actual del software de configuración | |
Editar |
Deshacer |
- |

|
Deshacer la última operación |
Rehacer |
- |

|
Restaurar la última operación | |
Copiar |
- |

|
Copiar el gráfico de detección de un determinado canal de detección | |
Cortar |
- |

|
Cortar el gráfico de detección de un determinado canal de detección | |
Pegar |
- |

|
Pegar el gráfico de detección de un determinado canal de detección a otro canal | |
Borrar |
- |

|
Borrar el gráfico del canal de detección seleccionado actualmente | |
Borrar todo |
- |

|
Borrar todos los gráficos de los canales de detección | |
Aplicar configuración |
- |

|
- | |
Ventana |
Ventana |
Editar |

|
Haga clic en el icono para mostrar el cuadro de función de edición del software de configuración |
Monitoreo |

|
Haga clic en el icono para mostrar el estado de monitoreo del software de configuración | ||
Configuración del sensor |

|
Haga clic en el icono para mostrar el cuadro de función de configuración de parámetros del sensor del software de configuración | ||
Simulación de entrada y salida |

|
Haga clic en el icono para mostrar el cuadro de función de simulación de entrada y salida del sensor | ||
Estado de autocomprobación |

|
Haga clic en el icono para mostrar el estado de autocomprobación del sensor | ||
Distancia |
- |

|
Haga clic para cerrar o mostrar el perfil de escaneo de rango de 320° actual del sensor | |
Intensidad |
- |

|
Haga clic para cerrar o mostrar la intensidad de reflexión de los obstáculos | |
Lista de datos |
- |

|
El software de configuración no admite la salida de datos de distancia de todos los puntos de detección actuales; este elemento no está disponible | |
Ajustes |
Puerto serie |
- |

|
El sensor no admite la conexión del puerto serie al software de configuración; este elemento no está disponible |
Ethernet |
- |

|
Haga clic para seleccionar la conexión Ethernet al software de configuración |
|
Ajustes del puerto serie |
- |

|
El sensor no admite la conexión del puerto serie al software de configuración; este elemento no está disponible |
|
Ajustes de Ethernet |
- |

|
Haga clic para ver la dirección Ethernet actual del sensor |
|
|
Interfaz |
Puerto serie |

|
El sensor no admite la conexión del puerto serie al software de configuración; este elemento no está disponible |
|
Ethernet |
|
||
Conectar |
Conectar dispositivo |
- |

|
Haga clic para conectar el sensor al software de configuración |
Desconectar dispositivo |
- |

|
Haga clic para desconectar el sensor del software de configuración |
|
Cargar datos |
- |

|
Haga clic para cargar el gráfico del canal de detección y los diversos parámetros configurados para el sensor |
|
Descargar datos |
- |

|
Haga clic para descargar el gráfico del canal de detección y varios parámetros |
|
Reiniciar dispositivo |
- |

|
Después de configurar el gráfico del canal de detección y sus parámetros, haga clic en este icono para reiniciar el sensor y que los parámetros surtan efecto |
|
Información del sensor |
- |

|
- | |
Pantalla |
Visualización de gráficos |
- |

|
Haga clic en este icono para mostrar el perfil de escaneo de 320° del sensor como un gráfico plano |
Visualización de la nube de puntos |
- |

|
Haga clic en este icono para mostrar el perfil de escaneo de 320° del sensor como una nube de puntos |
|
Visualización de líneas |
- |

|
Haga clic en este icono para mostrar el perfil de escaneo de 320° del sensor como líneas |
|
Idioma |
Chino simplificado |
- |

|
Haga clic en este icono para mostrar el software de configuración en chino |
Inglés |
- |

|
Haga clic en este icono para mostrar el software de configuración en inglés |
|
Ayuda |
Acerca de |
- |

|
Haga clic en este icono para mostrar la información de versión del software de configuración |
Guía |
- |

|
6.2.3 Iconos de acceso directo
Todos los iconos de acceso directo se explican en la Sección 1 de la barra de menú.
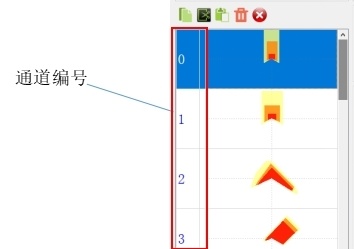
6.2.4 Edición de gráficos de canales de detección
El sensor admite los canales de detección 0-63; cada canal de detección admite 3 salidas gráficas de área de detección. El sensor puede seleccionar canales a través de Ethernet y emitir si hay obstáculos que invaden las 3 áreas de detección del canal.
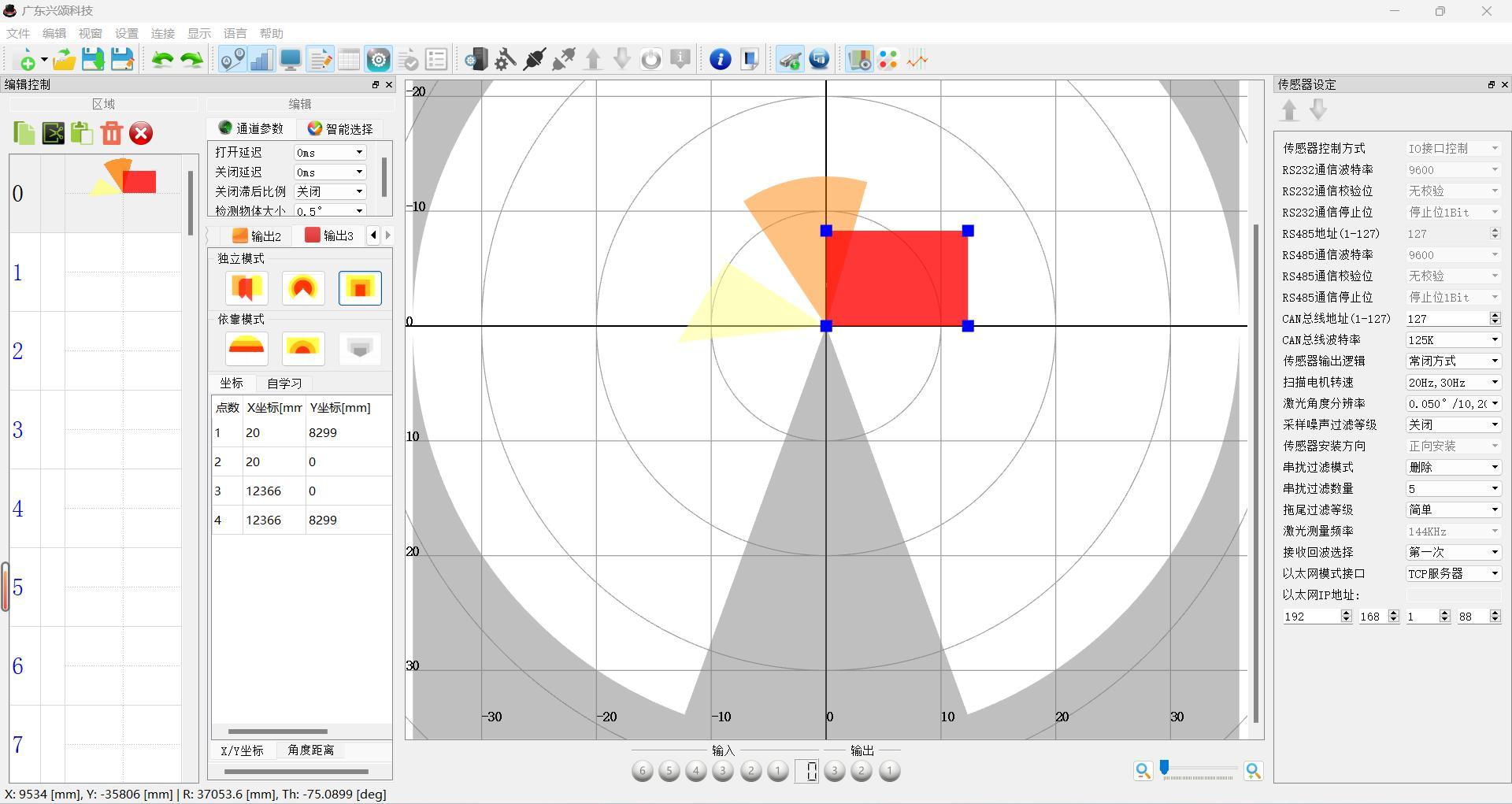
6.2.5 Edición de salida
Modo de edición de salida gráfica de detección de canal 1, salida 2, salida 3.
Modo independiente: En el modo independiente, se pueden configurar por separado formas irregulares, sectores y rectángulos, donde las formas irregulares pueden constar de hasta 100 puntos conectados.
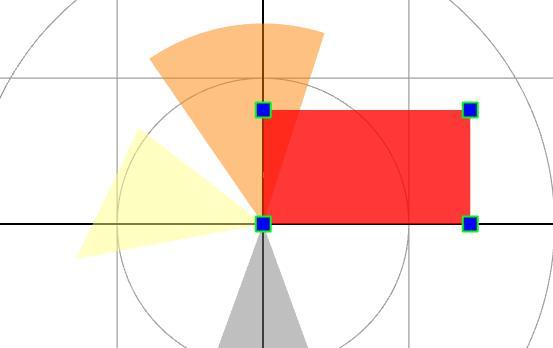
Modo dependiente: Después de configurar el gráfico de la salida 1, puede elegir el modo dependiente para copiar el gráfico de la salida 1 a diferentes escalas.
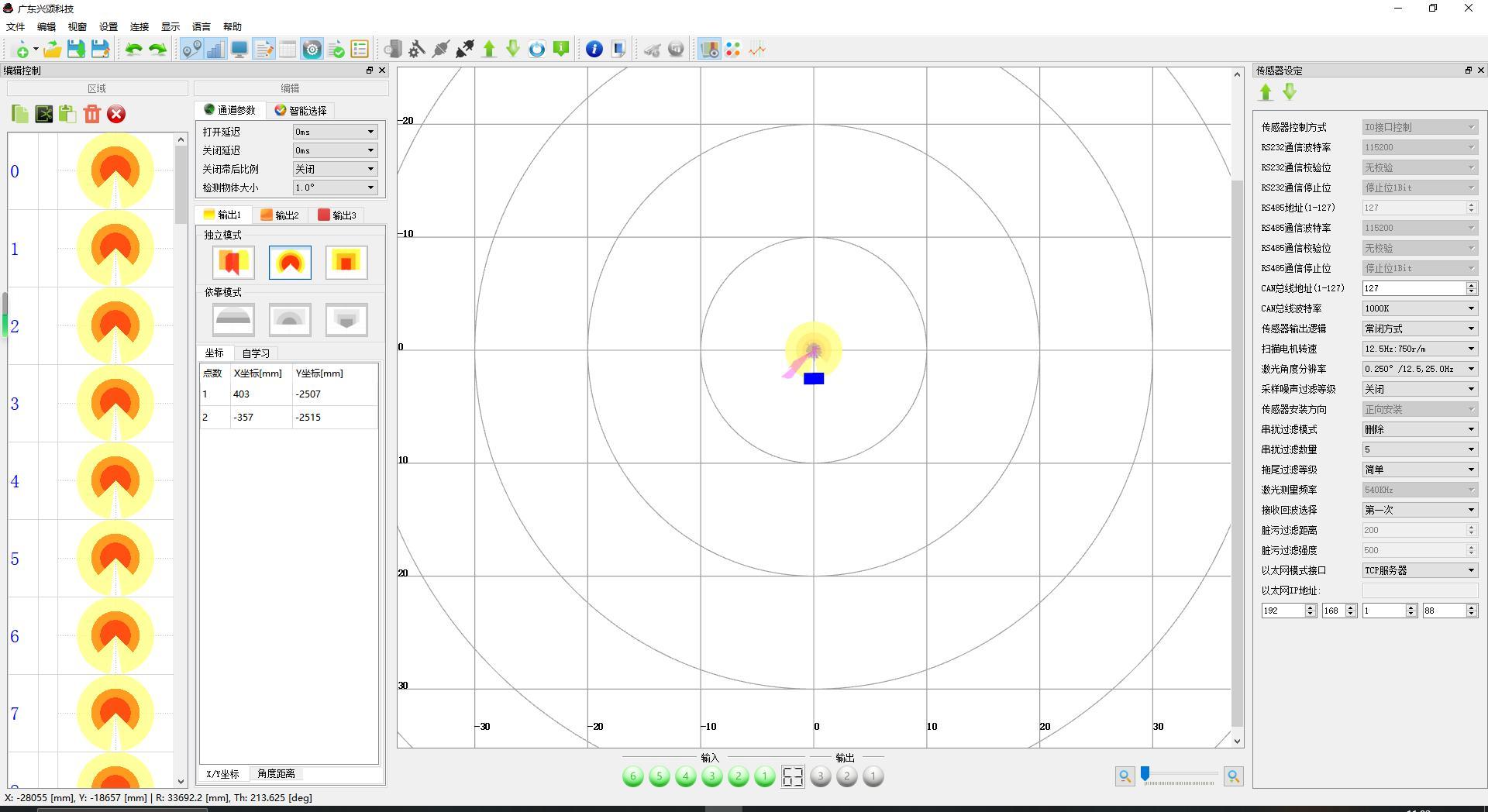
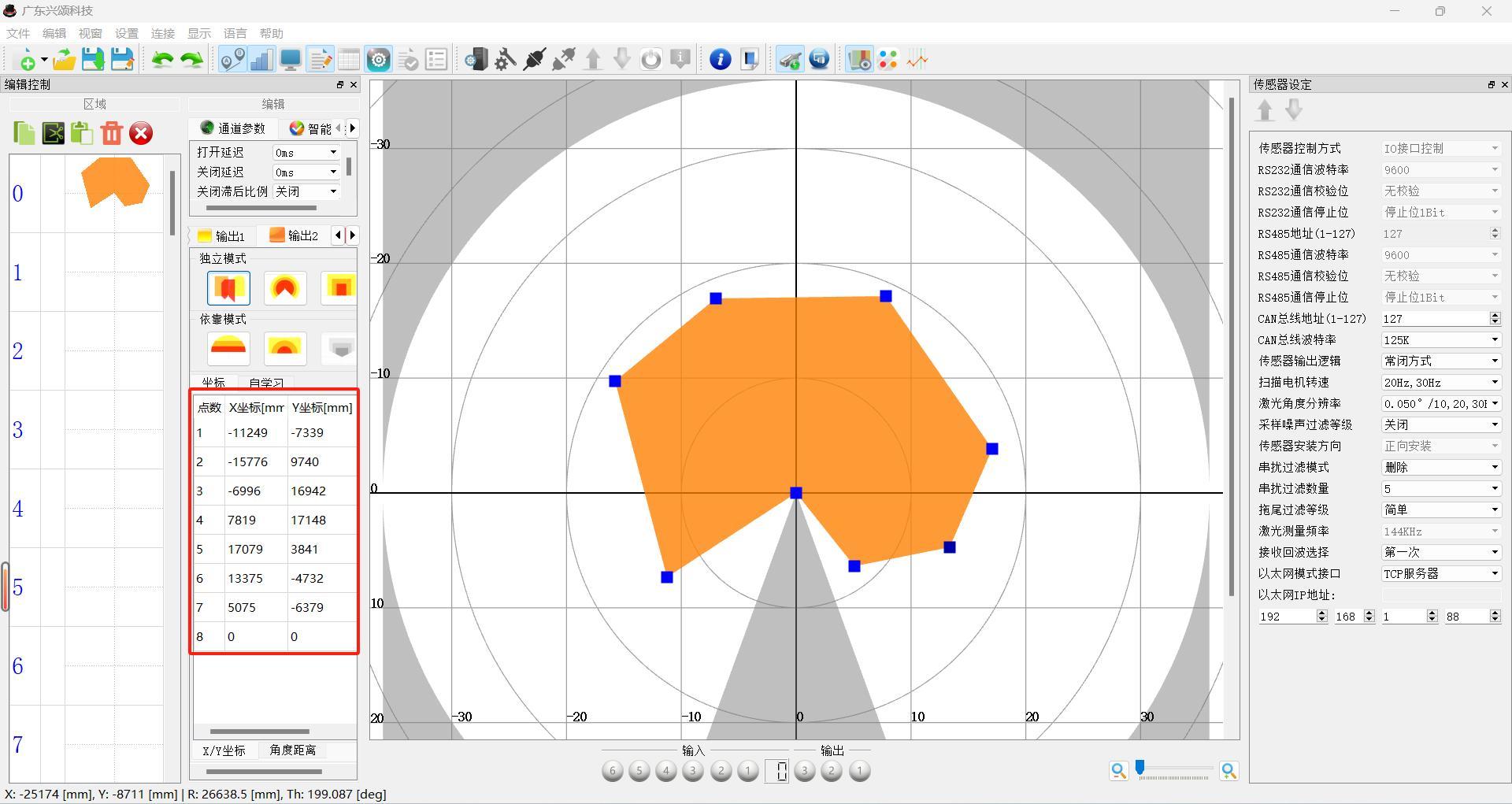
6.2.6 Coordenadas y valores de ángulo
Coordenadas (X, Y) de cada punto de la forma irregular en el modo independiente:
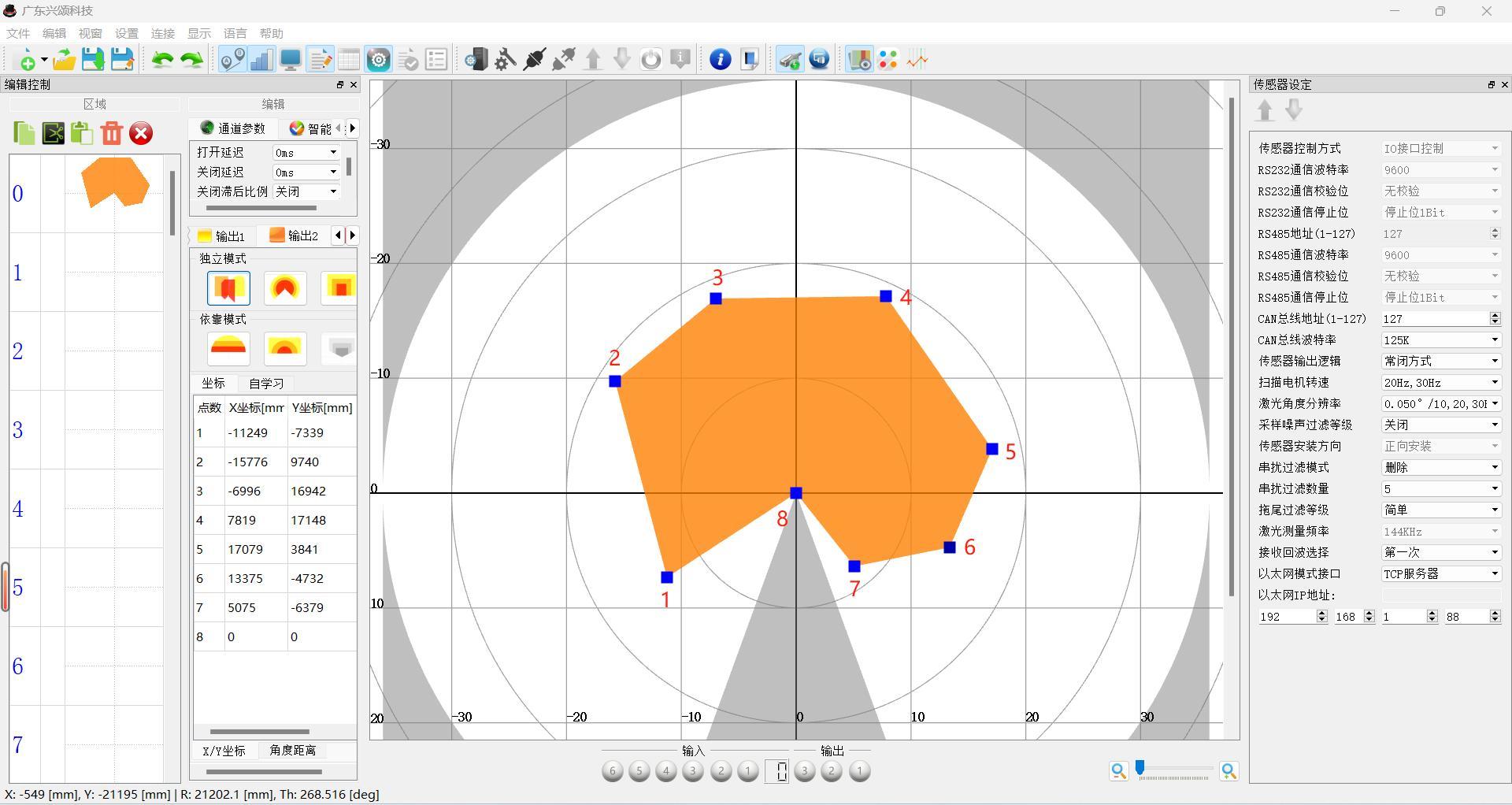
Nota: El punto 8 es el origen de las coordenadas.
Distancias y ángulos de cada punto de la forma irregular desde el origen en el modo independiente:
Nota: El punto 8 es el origen de las coordenadas.
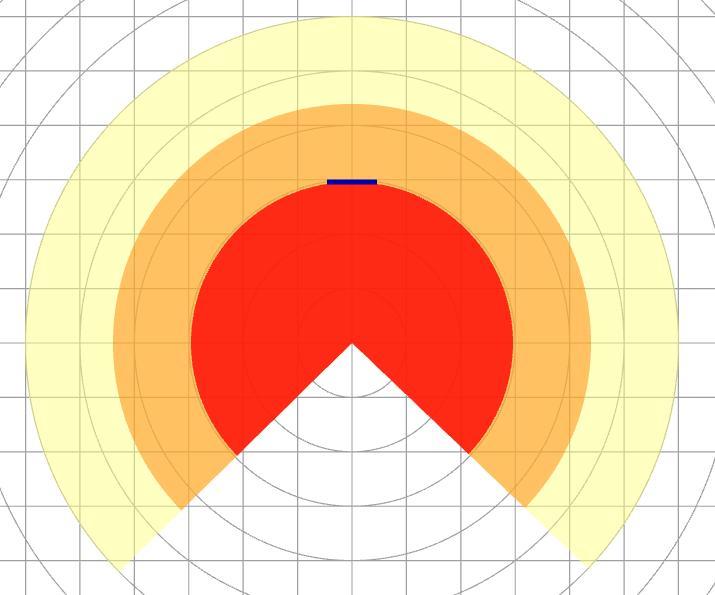
6.2.7 Visualización del estado de escaneo
Perfil de escaneo, intensidad de reflexión, área de visualización gráfica del canal de detección
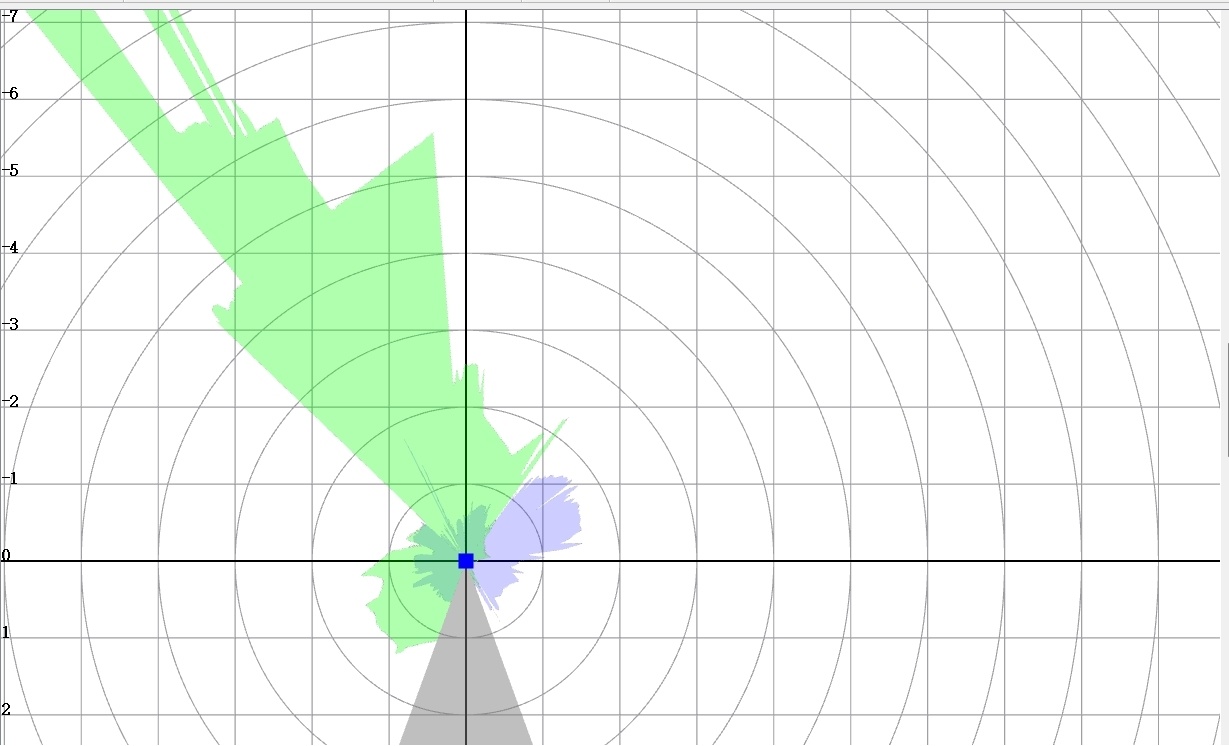
Nota: 1 La línea verde indica el perfil de escaneo, 2 La línea azul indica la intensidad de reflexión.
6.2.8 Supervisión de entradas y salidas
- 4 entradas de cantidad de conmutación y 2 salidas de cantidad de conmutación
- 4 entradas de cantidad de conmutación seleccionan los canales de detección 48-63 (también se puede especificar el canal seleccionado a través de Ethernet)
- 2 cantidades de conmutación emiten las señales de estado de la salida 1 y la salida 3 respectivamente.
Lista de parámetros |
Valor del parámetro |
Observaciones |
|---|---|---|
Método de control del sensor |
Control de interfaz de E/S |
Al seleccionar el canal del sensor, elija uno de E/S, Modbus, Canopen; solo uno puede ser efectivo al mismo tiempo, la E/S siempre es efectiva durante la salida. |
Control de comunicación Modbus |
Al seleccionar el canal del sensor, elija uno de E/S, Modbus, Canopen; solo uno puede ser efectivo al mismo tiempo, la E/S siempre es efectiva durante la salida. Cuando se selecciona el control de comunicación Modbus, la salida Modbus es efectiva. |
|
Control de comunicación Canopen |
Al seleccionar el canal del sensor, elija uno de E/S, Modbus, Canopen; solo uno puede ser efectivo al mismo tiempo, la E/S siempre es efectiva durante la salida. Cuando se selecciona el control de comunicación Canopen, la salida Canopen es efectiva. |
|
Dirección RS485 (1-127) |
1-127 |
Se puede configurar la dirección de comunicación RS485 de 1 a 127. |
Velocidad en baudios de comunicación RS485 |
9600bps |
Configuración de la velocidad en baudios de comunicación RS485 |
19200bps |
||
38400bps |
||
57600bps |
||
115200bps |
||
Bit de paridad RS485 |
Sin paridad |
Configuración del código de paridad RS485 |
Paridad impar |
||
Paridad par |
||
Bit de parada de comunicación RS485 |
Bit de parada 1 bit |
Configuración del bit de parada RS485 |
Bit de parada 1,5 bits |
||
Bit de parada 2 bits |
||
Dirección del bus CAN (1-127) |
1-127 |
Se puede configurar la dirección de comunicación CAN 1-127. |
Velocidad de transmisión del bus CAN |
125K |
Velocidad de transmisión del bus CAN |
250K |
||
500K |
||
1000K |
||
Lógica de salida del sensor |
Modo normalmente abierto |
Configuración de salida del sensor normalmente abierta, normalmente cerrada |
Modo normalmente cerrado |
||
Resolución del ángulo del láser |
0.025°/12.5HZ 0.050°/12.5, 25HZ 0.100°/12.5, 25, 50HZ 0.200°/50HZ 0.250°/12.5, 25HZ 0.500°/12.5, 25, 50HZ |
Resolución predeterminada 0.250° |
Nivel de filtrado de ruido |
Desactivado Simple
Medio
Estricto |
Configuración del nivel de filtrado de ruido, el valor predeterminado está desactivado |
Dirección de instalación del sensor |
Instalación frontal |
Parámetro actualmente no efectivo |
Modo de filtrado de diafonía |
Desactivado Ajuste Borrar |
Eliminar predeterminado. Habilitar la prevención de interferencias para otros sensores |
Cantidad de filtrado de diafonía |
3-8 |
El valor predeterminado es 5, el número de puntos de filtrado; cuantos más puntos de filtrado, mejor el efecto antiinterferencias, pero habrá cierta distorsión en las partes de borde de la imagen. |
Nivel de filtro de seguimiento |
Desactivado Simple
Medio
Estricto |
Configuración del nivel de filtro de seguimiento, el valor predeterminado es simple |
Frecuencia de medición del láser |
540KHz |
Frecuencia de medición del sensor, este parámetro no se puede modificar en la actualidad |
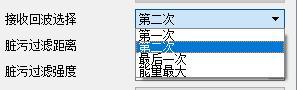
Selección de eco |
Primera vez Segunda vez Última vez Energía máxima |
Primera vez: modo normal, sin función de filtrado Segunda vez: seleccione el segundo eco, con función de filtrado Última vez: seleccione el último eco, con función de filtrado Energía máxima: seleccione el eco con la energía máxima, con función de filtrado El valor predeterminado es la primera vez |
Distancia de filtrado de suciedad |
0-2000 |
Configuración de la distancia de filtrado de suciedad, el valor predeterminado es 200 |
Intensidad de filtrado de suciedad |
0-2000 |
Configuración de la distancia de filtrado de suciedad, el valor predeterminado es 200 |
Interfaz de modo Ethernet |
Servidor TCP | Servidor TCP predeterminado |
Modo UDP |
||
Dirección IP de Ethernet |
Configuración de la dirección IP del sensor |
6.2.10 Configuraciones de múltiples ecos (para FE35FB-XXXXX)
|
|
Primera vez |
Modo normal, sin función de filtrado |
Segunda vez |
Seleccione el segundo eco, con función de filtrado (opción recomendada de función de eco) |
Última vez |
Seleccione el último eco, con función de filtrado |
Energía máxima |
Recibir eco con energía máxima |
Nota : En el caso de múltiples láseres, el uso de la función de múltiples ecos y la selección para eliminar el modo de filtrado de diafonía provocará la desaparición de algunos puntos de la nube en la imagen. No utilice las funciones anteriores simultáneamente. |
|
7. Descripción de los datos del sensor
7.1 Sistema de coordenadas del sensor
|
|
|
7.2.1 Entorno de filtrado y distancia mínima
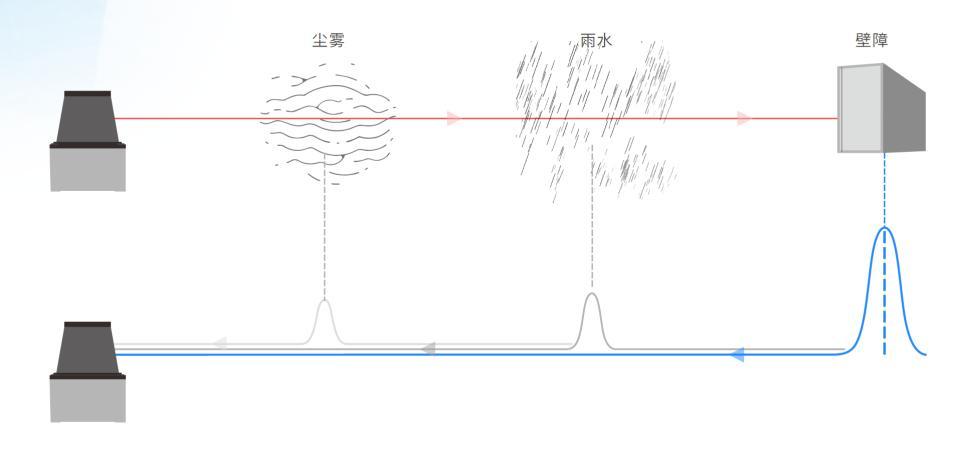
La tecnología de múltiples ecos puede detectar múltiples señales de eco para cada haz de medición, identificando así los ecos causados por la lluvia, el polvo o las estructuras complejas durante el ciclo de operación del haz emitido, y filtrándolos cuando sea necesario.
Para mostrar los ecos como valores de medición separados, debe haber una distancia mínima de aproximadamente 2,5 m entre dos objetos.
7.2.2 El impacto de las superficies de los objetos en las mediciones
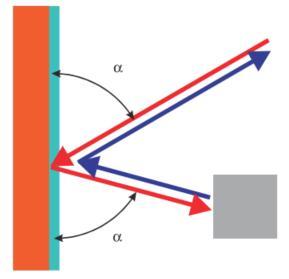
● Superficies reflectantes lisas
Las superficies reflectantes lisas no se pueden detectar, pero se pueden detectar los objetos iluminados por la luz reflejada de las superficies reflectantes lisas.
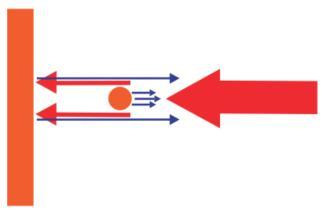
● Detección de objetos pequeños o sin objetos
Si el objeto detectado es más pequeño que el diámetro del haz, puede ser el caso de que
① La superficie del objeto pequeño refleja insuficientemente y no hay objetos de fondo, por lo que no se puede detectar;
② El objeto pequeño refleja insuficientemente, pero el objeto de fondo refleja suficientemente, lo que lleva a errores de detección;
③ Tanto el objeto pequeño como el objeto de fondo reflejan suficientemente, lo que resulta en valores de medición distorsionados;
7.3 Transmisión de datos Ethernet
◆ Configuración de parámetros
Abra el software de configuración, ingrese a la interfaz de configuración del sensor (lado del servidor) y configure los siguientes parámetros.

|
Nombre del parámetro |
Valor del parámetro |
Valor predeterminado |
Modo Ethernet |
Servidor TCP |
Servidor TCP |
|
Modo UDP |
|||
Dirección IP de Ethernet |
192.168.1. 1-254
El último byte se puede configurar de 1 a 254 El puerto del sensor (servidor) está fijo en 8080 |
192.168.1.88 |
Después de que el cliente inicia una solicitud y establece una conexión, comienza la transmisión de datos, siguiendo estas reglas:
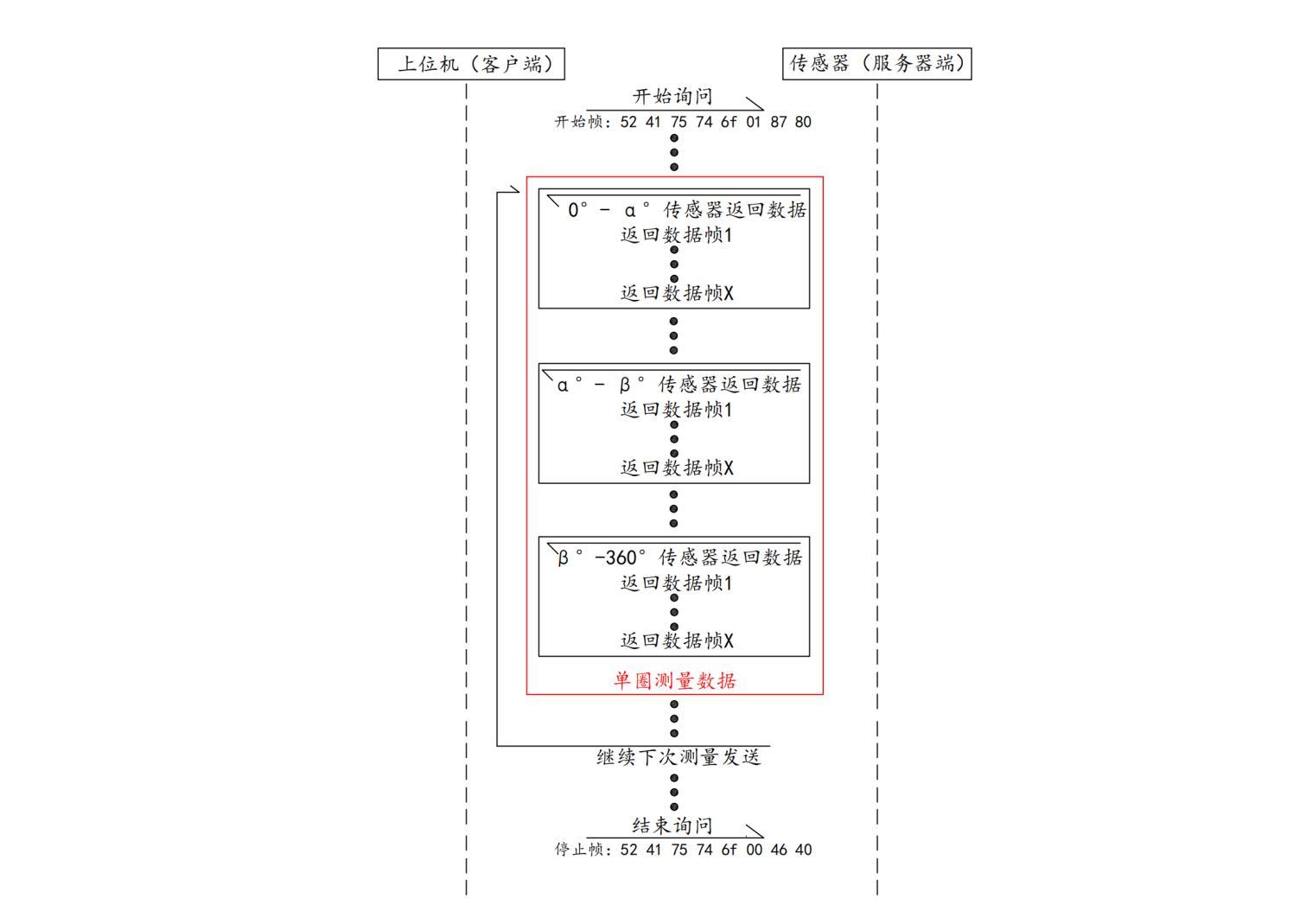
El ordenador host (cliente) envía un 'marco de datos de inicio' al sensor (lado del servidor), y el sensor devuelve los datos de medición para 0°-360° en varios marcos. Después de devolver los datos de medición completos para 0°-360° (un total de 360°), el sensor continúa enviando los siguientes datos de medición hasta que recibe un 'marco de datos de parada' enviado por el ordenador host.
- Marco de datos de inicio (Hexadecimal)
Estructura de datos
Código de inicio
|
Bit de control
|
Bit de verificación
|
5 B yte
|
1 B yte
|
2 B yte
|
Código de inicio: Los datos fijos son 0x52 0x41 0x750x740x6F
Bit de control:
0x01 El sensor comienza a enviar datos automáticamente;
0x00 El sensor deja de enviar datos;
Bit de verificación: Byte bajo primero, byte alto después, usando Modbus-C RC16 El bit de verificación calculado por el método.
- Marco de datos de medición (Hexadecimal)
Estructura de datos:
Encabezado del marco de datos
|
Datos de medición
|
16B yte
|
Longitud variable
|
Formato del encabezado del marco de datos (Hexadecimal):
Identificador
|
1 B yte
|
1Byte
|
|
1Byte
|
|
1Byte
|
|
Ángulo de inicio
|
1Byte (byte alto primero)
|
1Byte (byte bajo último)
|
|
Ángulo final
|
1Byte (byte alto primero)
|
1Byte (byte bajo último)
|
|
Número total de puntos de medición en el marco de datos actual
|
1Byte (byte alto primero)
|
1Byte (byte bajo último)
|
|
Número de secuencia del último punto de detección en el marco de datos actual
|
1Byte (byte alto primero)
|
1Byte (byte bajo último)
|
|
Número total de puntos de medición desde el ángulo de inicio hasta el ángulo final
|
1Byte (byte alto primero)
|
1Byte (byte bajo último)
|
|
Marca de tiempo
|
1Byte (byte alto primero)
|
1Byte (byte bajo último)
|
1. Identificador (4 B yte): 0x 48 0 x 49 0 x 53 0 x 4 e
2. Ángulo de inicio (2 B yte): Ángulo de inicio de los datos de medición devueltos actualmente;
3. Ángulo final (2 B yte): Ángulo final de los datos de medición devueltos actualmente;
4. Número total de puntos de medición en el marco de datos actual (2 B yte):
Debido a las diferentes resoluciones angulares, el número total de puntos de medición en el rango desde el ángulo de inicio hasta el ángulo final también variará. Los datos de medición se devolverán en varios marcos de datos dentro de este rango. El 'número total de puntos de medición en el marco de datos actual' es la suma de los puntos de medición devueltos en el marco de datos actual.
5. Número de secuencia del último punto de detección en el marco de datos actual (2 B yte):
Por ejemplo: El número total de puntos de medición desde el ángulo de inicio hasta el ángulo final es 800 dividido en 2 marcos para devolver datos de medición. El marco de datos actual devuelve datos para los puntos 1 a 400 entonces el valor de 'número de secuencia del último punto de detección en el marco de datos actual' es 400 si el marco de datos actual devuelve desde el punto 401 a 800 entonces el valor de 'número de secuencia del último punto de detección en el marco de datos actual' es 800.
6. Número total de puntos de medición en el rango desde el ángulo de inicio hasta el ángulo final (2 B yte):
El número total de puntos de medición en el rango desde el ángulo de inicio hasta el ángulo final está determinado por la 'frecuencia de escaneo láser', la 'velocidad del motor de escaneo' y las 'veces de muestreo de un solo punto' actuales.
A continuación se proporcionan ejemplos.
7. Marca de tiempo (2 B yte):
Muestra el tiempo interno del marco actual enviado, la unidad de tiempo es us, el rango de registro de tiempo es 0-65535us, los datos se borran después de que se completa el registro.
Datos de medición (Hexadecimal):
Datos de medición del primer punto (4Byte) |
Datos de medición del segundo punto (4Byte) |
………………… (4Byte) |
Datos de medición del último punto (4Byte) |
||||||||||||
Distancia de medición (2Byte) |
Intensidad de medición (2Byte) |
Distancia de medición (2Byte) |
Intensidad de medición (2Byte) |
Distancia de medición (2Byte) |
Intensidad de medición (2Byte) |
Distancia de medición (2Byte) |
Intensidad de medición (2Byte) |
||||||||
L |
H |
L |
H |
L |
H |
L |
H |
L |
H |
L |
H |
L |
H |
L |
H |
La unidad de distancia de medición es mm, que muestra los datos de distancia entre el punto de reflexión y el sensor.
La intensidad de medición refleja la intensidad del punto de reflexión, con valores más altos que indican una mayor capacidad de reflexión del objeto.
Tanto la distancia de medición como la intensidad de medición son byte bajo primero, byte alto después.
- Marco de datos de parada (Hexadecimal)
0x52 0x41 0x75 0x74 0x6F 0x00 0x46 0x40
Después de que el ordenador host envía el marco de datos de parada al sensor, el sensor deja de devolver datos de medición.
- Explicación del ejemplo
1. Los parámetros del sensor se configuran de la siguiente manera:
Interfaz de modo Ethernet: Servidor TCP
Dirección IP de Ethernet: 192.168.1.88
Velocidad del motor de escaneo: 12.5HZ
Puerto del sensor (servidor): 8080
Es importante tener en cuenta que el puerto del sensor (servidor) está fijado en 8080, y el ordenador host establece correctamente una conexión con el sensor. .
2. Cálculo de la resolución del ángulo de medición:
Frecuencia de escaneo láser: El número de rayos láser emitidos por el emisor láser en un segundo, tomando 432KHZ como ejemplo;
Velocidad del motor de escaneo: número de revoluciones del motor rotatorio del tubo de emisión láser en un segundo, tomando 12.5 HZ (12.5 r por segundo) como ejemplo;
Tiempos de muestreo de un solo punto: número de mediciones repetidas en un solo punto de medición. Tomando como ejemplo la medición de un solo punto de detección; 1 veces;
Resolución del ángulo de medición = velocidad del motor de escaneo * 360° / (frecuencia de escaneo láser / tiempos de muestreo de un solo punto) = 0. 100°, la resolución del ángulo de medición se calcula automáticamente mediante el software de configuración y no es necesario configurarlo por separado;
3. Cálculo de los puntos de medición totales:
Puntos de medición totales = (ángulo final - ángulo inicial) / resolución del ángulo de medición, los puntos de medición totales se redondean a un decimal y, según el diseño del sensor, se dividen en 13 bloques de datos de rango angular. Este valor de rango angular es fijo y no cambia con la variación de la resolución angular. Véase la figura 4 a continuación.
Primer ángulo inicial
|
Primer ángulo final
|
Rango angular
|
Segundo ángulo inicial
|
Segundo ángulo final
|
Rango angular
|
Tercer ángulo inicial
|
Tercer ángulo final
|
Rango angular
|
Cuarto ángulo inicial
|
Cuarto ángulo final
|
Rango angular
|
24 °
|
48 °
|
24 °
|
48 °
|
72 °
|
24 °
|
72 °
|
96 °
|
24 °
|
96 °
|
120 °
|
24 °
|
Quinto ángulo inicial
|
Quinto ángulo final
|
Rango angular
|
Sexto ángulo inicial
|
Sexto ángulo final
|
Rango angular
|
Séptimo ángulo inicial
|
Séptimo ángulo final
|
Rango angular
|
Octavo ángulo inicial
|
Octavo ángulo final
|
Rango angular
|
120 °
|
144 °
|
24 °
|
144 °
|
168 °
|
24 °
|
168 °
|
192 °
|
24 °
|
192 °
|
216 °
|
24 °
|
Noveno ángulo inicial
|
Noveno ángulo final
|
Rango angular
|
Décimo ángulo inicial
|
Décimo ángulo final
|
Rango angular
|
Undécimo ángulo inicial
|
Undécimo ángulo final
|
Rango angular
|
Duodécimo ángulo inicial
|
Duodécimo ángulo final
|
Rango angular
|
216 °
|
240 °
|
24 °
|
240 °
|
264 °
|
24 °
|
264 °
|
288 °
|
24 °
|
288 °
|
312 °
|
24 °
|
Decimotercer ángulo inicial
|
Decimotercer ángulo final
|
Rango angular
|
|
|
|
|
|
|
|
|
|
312 °
|
336 °
|
24 °
|
|
|
|
|
|
|
|
|
|
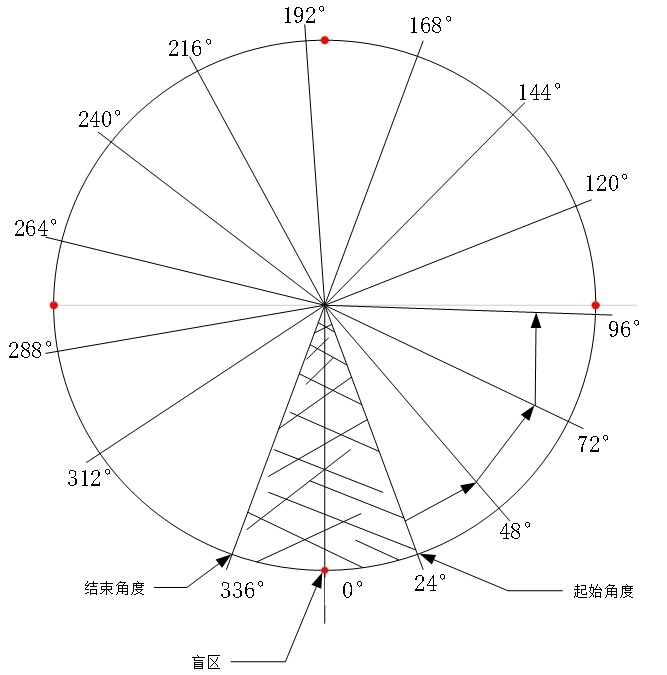
Tomando como ejemplo un ángulo final de 24°, un ángulo inicial de 0° y una resolución angular de 0.100°, los puntos de medición totales = (24-0) / 0.100 = 240.
Estado del sensor y adquisición de datos de detección de área
Después de iniciar una solicitud y establecer una conexión en el lado del cliente, comienza la transmisión de datos, siguiendo las reglas a continuación.
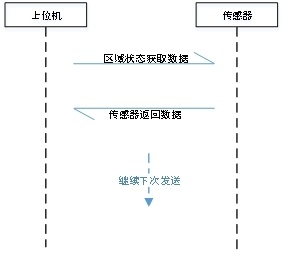
Envío de adquisición de datos Mensaje
Identificador de datos
|
5 B yte
|
Modo de funcionamiento del sensor |
1 B yte
|
Valor del canal del sensor
|
1 B yte
|
Valor del ángulo de conmutación en el modo de selección de canal inteligente
|
2B yte
|
Valor de velocidad de conmutación en el modo de selección de canal inteligente
|
2B yte
|
Número de grupo de canales
|
2 B yte
|
Bit de datos no válido
|
3 B yte
|
Bit de verificación
|
2 B yte
|
- Identificador de datos ( 5 byte)
El identificador es fijo Datos: 0x57 0x53 0x69 0x6d 0x75 La función de estos datos;
- Modo de funcionamiento del sensor ( 1 byte)
00: Comando no válido
01: Modo de canal designado
02: Modo de selección de canal inteligente
- Valor del canal del sensor ( 1 byte)
Controla el canal de detección actual utilizado por el sensor, rango de datos 0 0-63;
- Ángulo del canal del sensor ( 2 byte)
Valor del ángulo en el modo de grupo de canales, los datos están en el rango de datos con signo -180 a 180;
- Valor de velocidad del canal del sensor ( 2 byte)
Valor de velocidad en el modo de grupo de canales, los datos están en el rango de datos con signo - 300-300;
- Número de grupo de canales del sensor ( 2 byte)
Controla el número de grupo de canales de detección actual utilizado por el sensor, rango de datos 0 0 -04;
- Datos no válidos ( 3 byte)
Datos no válidos, se deben enviar datos predeterminados 0 x 00;
- Bit de verificación (2 bytes)
Bit de verificación de datos, utilizando el byte bajo Modbus primero C RC16 Método de verificación. El valor de verificación se calcula utilizando la fórmula de verificación, para métodos de cálculo específicos, consulte el apéndice.
Datos devueltos por el sensor
Identificador de datos
|
5 B yte
|
Valor del canal del sensor
|
1 B yte
|
No válido
|
1 B yte
|
Estado de salida
|
1 B yte
|
Datos no válidos
|
1B yte
|
Estado de falla
|
1 B yte (H)
|
|
1Byte (L)
|
Temperatura actual
|
1 B yte
|
|
1Byte
|
Velocidad del motor interno
|
1 B yte (H)
|
|
1Byte (L)
|
Tensión de accionamiento
|
1 B yte (H)
|
|
1Byte (L)
|
Tensión de recepción
|
1 B yte (H)
|
|
1Byte (L)
|
Tensión de envío
|
1 B yte (H)
|
|
1Byte (L)
|
Bit de verificación
|
1 B yte (L)
|
|
1Byte (H)
|
- Identificador de datos ( 5 byte)
El identificador es fijo Datos: 0x57 0x53 0x69 0x6d 0x75 La función de estos datos;
- Valor del canal actual (1 byte)
Valor del canal actual del sensor;
- Datos no válidos ( 1 byte)
Datos no válidos;
- Estado de salida ( 1 byte)
B eso 7
|
B eso 6
|
B eso 5
|
B eso 4
|
B eso 3
|
B eso 2
|
B eso 1
|
B eso 0
|
No válido
|
OUT 3 |
OUT2 |
OUT1 |
||||
Relacionado con la configuración de parámetros Lógica de salida del sensor :
Modo normalmente cerrado (predeterminado)
0 0: Objeto detectado;
01 : Objeto no detectado
Modo normalmente abierto
01 : Objeto detectado;
00 : Objeto no detectado;
- Datos no válidos ( 1 byte)
Datos no válidos;
- Estado de falla del sensor ( 2 byte)
|
||||||||||||||||||||||||||
Código de falla del sensor
|
- Temperatura actual ( 2 byte)
|
||||
Datos con signo, rango de datos -5000-10000; muestra la temperatura interna actual del sensor, unidad de temperatura 0.01℃; cuando la temperatura monitoreada excede los 80.00℃, el sensor indica protección contra sobretemperatura;
|
||||
- Velocidad interna del motor ( 2 byte)
|
||||
Datos sin signo, rango de datos 0-3000, muestra la velocidad interna actual del motor del sensor, unidad de velocidad 1r/min;
|
||||
- Tensión de accionamiento ( 2 byte)
|
||||
Datos sin signo, rango de datos 0-1600; muestra la tensión actual del motor de accionamiento del sensor, unidad de tensión 0.01V;
|
||||
- Tensión de la placa receptora ( 2 byte)
|
||||
Datos sin signo, rango de datos 0-25000; muestra la tensión ADP actual de la placa receptora del sensor, unidad de tensión 0.01V;
|
||||
- Tensión de la placa de envío ( 2 byte)
|
||||
Datos sin signo, rango de datos 0-5500; muestra la tensión actual de la placa de envío del sensor, unidad de tensión 0.01V;
|
||||
- Bit de verificación (2 bytes)
Bit de verificación de datos, utilizando el byte bajo Modbus primero C RC16 Método de verificación. El valor de verificación se calcula utilizando la fórmula de verificación.
Función de verificación CRC 7.4
cBuffer: Matriz para calcular el código de verificación CRC.
iBufLen: Longitud de la matriz.
unsigned int CRC_Verify(unsigned char *cBuffer, unsigned int iBufLen)
{
unsigned int i, j; //#define wPolynom 0xA001
unsigned int wCrc = 0xffff;
unsigned int wPolynom = 0xA001;
/*---------------------------------------------------------------------------------*/
for (i = 0; i < iBufLen; i++)
{
wCrc ^= cBuffer[i];
for (j = 0; j < 8; j++)
{
if (wCrc & 0x0001)
{ wCrc = (wCrc >> 1) ^ wPolynom; }
else
{ wCrc = wCrc >> 1; }
}
}
return wCrc;
}
Adquisición del controlador ROS 7.5
Para los clientes que utilizan sensores en un entorno ROS, se pueden utilizar controladores específicos proporcionados. El paquete del controlador ROS se puede obtener de la siguiente manera:
Visite: www.hinson-xs.com |
Póngase en contacto con el personal de ventas y soporte técnico de Hinson |
Visite Gitee: https://gitee.com/hinson-xs/hins_he_driver.git
|
Cuando el sensor no funciona normalmente o no se puede determinar el estado del sensor, consulte la siguiente tabla para el diagnóstico y la confirmación de fallas.
El sensor láser indica el estado de falla mediante el parpadeo del LED:
Parpadeo del LED (veces) |
Descripción de la falla |
0
|
Estado normal del sensor
|
1
|
Error en la señal del codificador del sensor
|
2
|
Sin señal de la placa receptora
|
3
|
Error en los datos de la memoria
|
4
|
Error de conexión
|
5
|
Error de simulación
|
6
|
Protección contra sobretemperatura
|
7
|
Protección contra baja tensión de envío
|
8
|
Protección contra alta tensión de envío
|
9
|
Protección contra baja tensión de accionamiento
|
10
|
Protección contra alta tensión de accionamiento
|
11
|
Protección contra baja tensión de recepción
|
12
|
Protección contra alta tensión de recepción
|
Período de garantía 9.1
El sensor proporciona una garantía limitada. Durante el período de garantía, si el producto no puede utilizarse normalmente debido a problemas de calidad o defectos de diseño, proporcionaremos mantenimiento posventa gratuito.
Período de garantía: 2 años a partir de la fecha de venta.
Los productos dentro del período de garantía que cumplen con las condiciones de garantía serán reparados o reemplazados sin cargo.
La garantía y el servicio posventa de este producto se limitan a China continental;
* Productos que no se pueden usar normalmente debido a daños durante el transporte;
* Productos que no pueden funcionar normalmente debido a daños en los propios componentes;
* Productos que no se pueden usar normalmente debido a defectos de diseño;
9.3 Alcance de la exención
* Preste atención a las siguientes condiciones durante el uso del producto; no proporcionaremos servicio postventa y garantía gratuitos.
* Daños causados por una instalación incorrecta del producto según el manual;
* Daños causados por el uso del producto en entornos y condiciones inadecuadas;
* Daños causados por no seguir las especificaciones del manual del producto;
* Desmontaje o reparación no autorizados del producto sin el permiso de la empresa;
* Daños causados por desastres naturales, incendios y otras fuerzas externas irresistibles.
9.4 Soporte técnico
Si hay fallas irresolubles, contáctenos de la siguiente manera.
Teléfono: +86-757-22218956
Correo electrónico: lixianjiao@hinson-xs.com
Sitio web de la empresa: www.hinson-xs.com
Fabricante: Guangdong Hinson Technology Co., Ltd.
Tabla de contenido
1.1. Precauciones sobre el entorno aplicable
1.2. Precauciones sobre el entorno de cableado
1.3. Precauciones sobre el entorno de depuración
3.2. Herramientas de depuración
4.2. Descripción de los componentes
4.3. Descripción de la luz indicadora
4.4. Requisitos de instalación
5.1. Puertos de cantidad de potencia e interruptor
5.2. Conexiones de señal de entrada y salida
5.2.1. Conexión de señal de entrada
5.2.3. Cableado de señal de salida
6. Configuración de la función
6.1 Preparación del dispositivo
6.2. Conexión entre el sensor y el software de configuración
6.2.1. Abrir el software de configuración
6.2.3. Icono de acceso directo
6.2.4. Edición gráfica del canal de detección
6.2.6. Coordenadas y sus valores angulares
6.2.7. Visualización del estado de escaneo
6.2.8. Monitoreo de entrada y salida
6.2.10. Configuración de múltiples ecos (solo para FE-XXXXXFA)
7. Descripción de los datos del sensor
7.1. Sistema de coordenadas del sensor
7.2.1. Entorno de filtrado y distancia mínima
7.2.2. El impacto de la superficie del objeto en la medición
7.3. Transmisión de datos Ethernet
7.4. Función de verificación CRC
7.5. Adquisición del controlador ROS
Soluciones para su industria, listas para sus elecciones

Hinson
Guangdong Hinson Technology Co., Ltd.
Apoyar a los clientes para que se conviertan en líderes de la industria
Proveedor de soluciones de control y detección de automatización industrial
Número público de WeChat
Consultoría empresarial
Teléfono de atención al cliente
Edificio 8, Jardín Shengyue, 33 Carretera Este Shunye, Pueblo Xingtan, Distrito Shunde, Ciudad Foshan, Provincia de Guangdong
(Parque Industrial de Maquinaria de Shunde)
 Português
Português